Franka Panda
Dexterous multi-fingered hands promise far richer manipulation skills than simple parallel grippers, yet most existing benchmarks and datasets still target low-DoF end-effectors. In an era where increasingly advanced physical hands are being developed at high speed, we lack a unified, low-cost simulation and benchmarking environment to study dexterous control. We introduce Dexsuite , a modular framework that standardizes observations, action spaces, and evaluation protocols for multi-fingered hands while remaining easily extensible to new robots, environments, and tasks. Alongside the framework, we release a curated dataset of over 150k frames of multi-modal hand interaction, collected with a Manus glove on a suite of manipulation tasks, providing high-fidelity supervision of finger motion and contact-rich interactions. DexSuite also offers benchmark tasks and baselines spanning imitation learning, reinforcement learning, and diffusion policies, enabling fair comparison across algorithm families and hand representations, and providing a common testbed for systematic study of robotic dexterity.
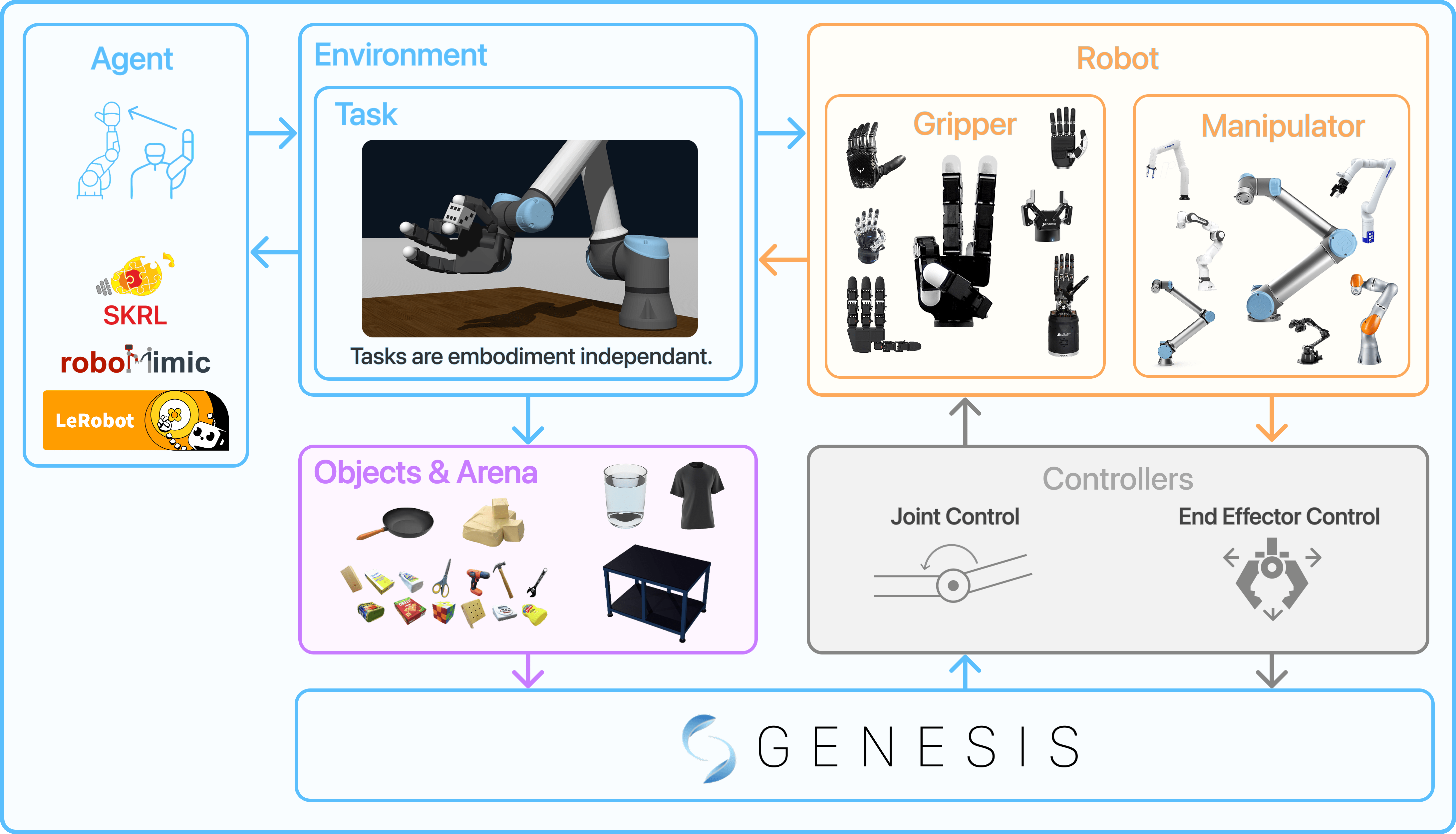
DexSuite is a unified simulation framework and benchmark for dexterous manipulation. It separates a Base Environment from modular Tasks and uses robot abstractions to pair any manipulator with any gripper or multi‑finger hand in single or bimanual settings across rigid, articulated, and deformable objects.
We provide a 150k frame dexterity dataset spanning 15 environments with four vision
modalities: RGB, depth, segmentation, and surface normals. The dataset is stored in the
LeRobotDataset
format with episode trajectories, synchronized timestamps, and metadata for single and
bimanual variants. Loaders are included to stream batches for imitation and offline RL. We
also provide utilities to convert to
Robomimic
or
RLDS
dataset.

We provide multiple teleoperation devices, ranging from simple keyboard to specialized hardware such as Manus Gloves for Hand data collection.
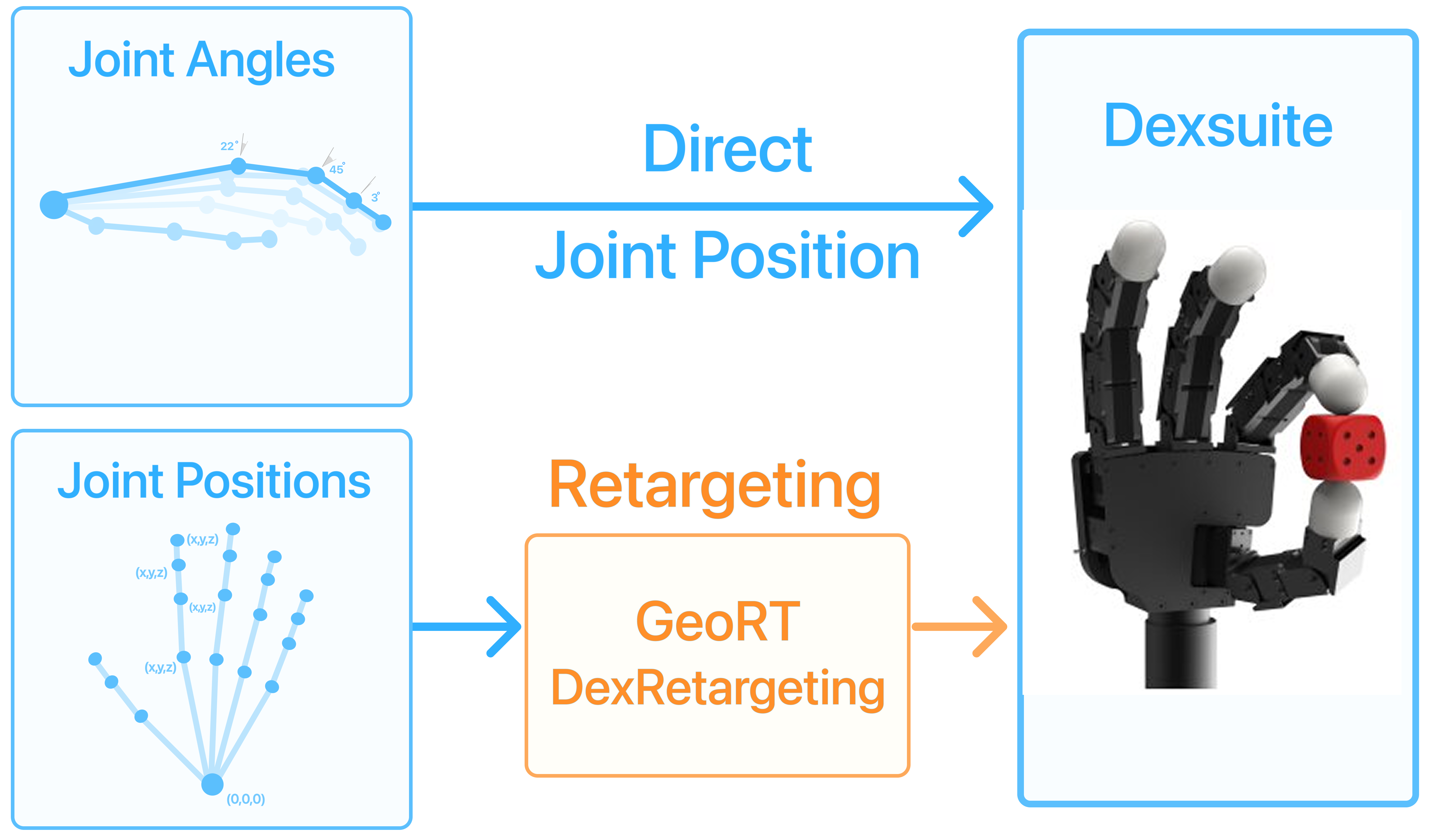
We also provide native integration of retargeting tools both direct qpos to qpos and more advanced retargeting.
Native Vive Tracker/Controller integration for Pose control.
Manus glove path from real to simulator using Geometric retargeting, producing strong teleoperation dexterous hands.
DexSuite supports modular manipulators with swappable hands and integrated robots with native grippers. The catalog covers configurations from Panda with Allegro to dual‑arm presets in one place.

Mix and match manipulators and grippers. Not all hands are compatible with all manipulators.
Our environment initialization function allows you to make any environment, with custom Simulator, Robot, and Cameras without ever touching Dexsuite code. We also provide a web based environemnt maker that allows user to make any config, copy-paste the code and run it.

Select an environment to preview it before the table.
Pick and Place Pan
The suite provides single-arm and bimanual environments across rigid, articulated, and deformable object tasks.
| Environment | Mode | Type |
|---|---|---|
| Reach | Single-arm | Rigid |
| Push | Single-arm | Rigid |
| Lift | Single-arm | Rigid |
| Pick Place | Single-arm | Rigid |
| Pick Place Fruit | Single-arm | Rigid |
| Pick Place Mug | Single-arm | Rigid |
| Pick Place Pan | Single-arm | Rigid |
| Stack | Single-arm | Rigid |
| Make Coffee | Single-arm | Rigid |
| Drill to Point | Single-arm | Rigid |
| Tool Hang | Single-arm | Rigid |
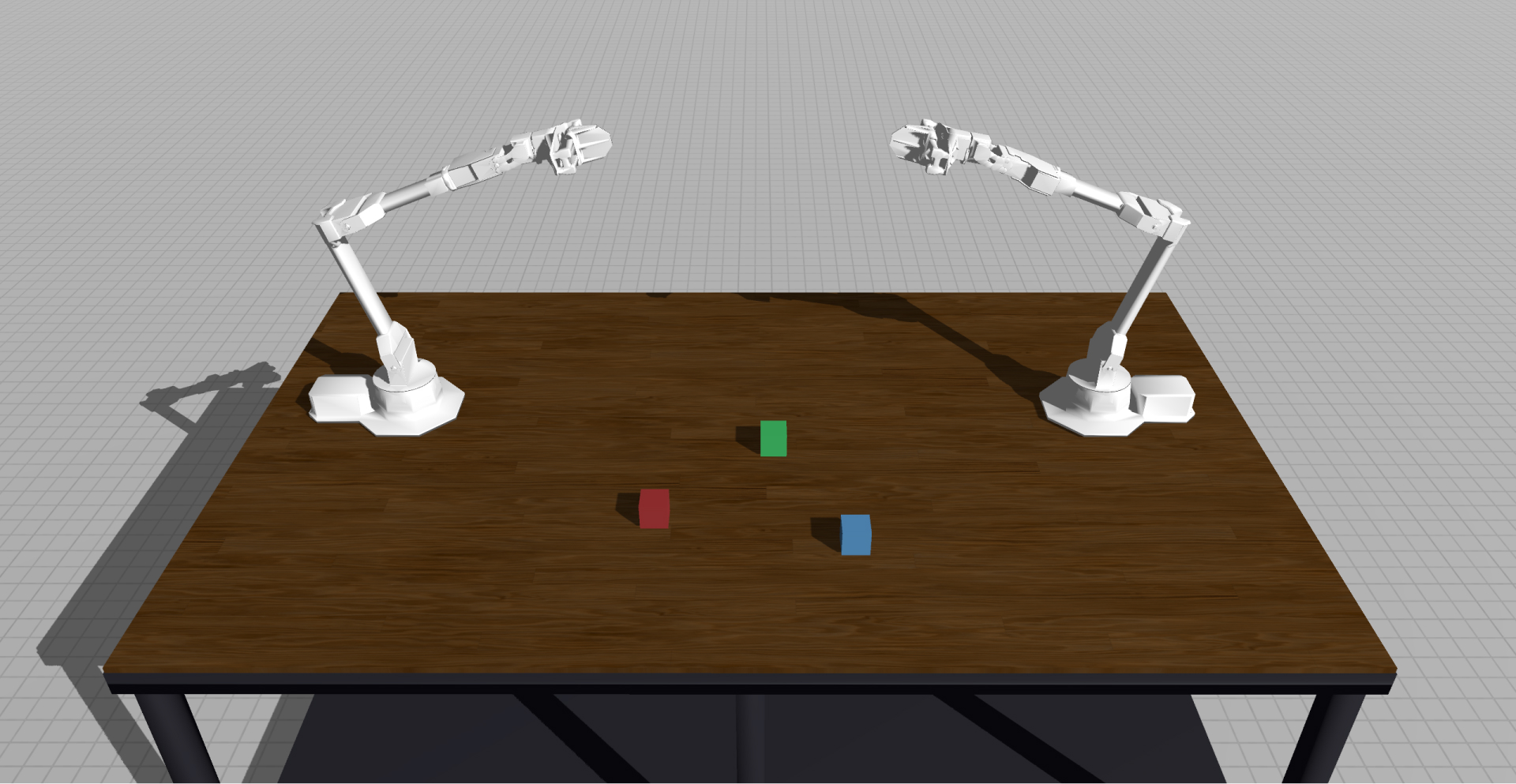
| Bimanual Reach | Bimanual | Rigid |
| Bimanual Push | Bimanual | Rigid |
| Bimanual Lift | Bimanual | Rigid |
| Bimanual Pick Place | Bimanual | Rigid |
| Bimanual Pick Place Mug | Bimanual | Rigid |
| Bimanual Pick Place Pan | Bimanual | Rigid |
| Bimanual Pick Place Pot | Bimanual | Rigid |
| Bimanual Stack | Bimanual | Rigid |
| Bimanual Stack Mid Air | Bimanual | Rigid |
| Bimanual Make Coffee | Bimanual | Rigid |
| Bimanual Drill to Point | Bimanual | Rigid |
| Bimanual Fold Glasses | Bimanual | Articulated |
| Open Jar | Single-arm | Articulated |
| Close Jar | Single-arm | Articulated |
| Open Faucet | Single-arm | Articulated |
| Close Faucet | Single-arm | Articulated |
| Cable Routing | Single-arm | Deformable |
| Cut Butter | Single-arm | Deformable |
| MPM Sponge Drop | Single-arm | Deformable |
| Pour Water | Single-arm | Deformable |
| Spread Butter | Single-arm | Deformable |
Teleoperation datasets power the imitation learning suite. We provide glove‑conditioned demonstrations, dataset utilities, and offline evaluation scripts so you can train supervised policies before running closed‑loop simulation.
| Task | BC-G | BC-GMM | Transformer | Diffusion |
|---|---|---|---|---|
| Reach | 91 ± 4 | 82 ± 4 | 99 ± 1 | 71 ± 1 |
| Lift | 71 ± 2 | 71 ± 5 | 87 ± 3 | 29 ± 1 |
| Push | 43 ± 5 | 51 ± 2 | 45 ± 6 | 57 ± 8 |
| Pick&Place | 61 ± 6 | 63 ± 5 | 69 ± 4 | 66 ± 7 |
| Stack | 2 ± 1 | 0 ± 0 | 5 ± 2 | 1 ± 1 |
| Task | BC-G | BC-GMM | Transformer | Diffusion |
|---|---|---|---|---|
| Reach | 63 ± 10 | 71 ± 10 | 79 ± 4 | 59 ± 1 |
| Lift | 73 ± 8 | 40 ± 4 | 65 ± 4 | 69 ± 3 |
| Push | 40 ± 5 | 24 ± 7 | 58 ± 5 | 55 ± 8 |
| Pick&Place | 18 ± 5 | 29 ± 8 | 35 ± 1 | 19 ± 4 |
| Stack | 0 ± 0 | 0 ± 0 | 0 ± 0 | 1 ± 1 |
| Rack Mug | 37 ± 7 | 55 ± 4 | 53 ± 3 | 38 ± 6 |
| Move Pan | 4 ± 2 | 68 ± 11 | 60 ± 7 | 50 ± 8 |
| DrilltoPoint | 38 ± 7 | 62 ± 3 | 59 ± 4 | 83 ± 9 |
| Place Fruits | 0 ± 0 | 0 ± 0 | 2 ± 0 | 9 ± 3 |
| Bimanual Stack Mid Air | 0 ± 0 | 0 ± 0 | 0 ± 0 | 0 ± 0 |
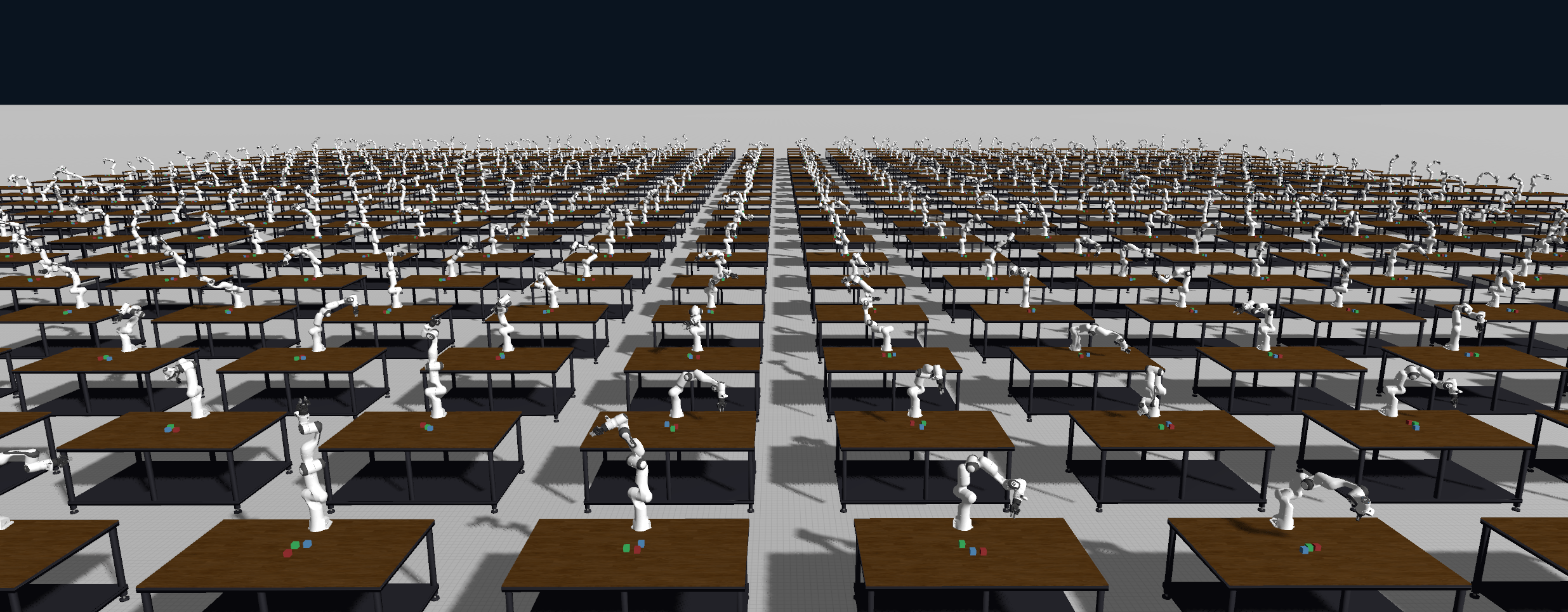
DexSuite provides vectorized rollouts and a unified reward API. PPO and SAC recipes are tuned for rigid and deformable manipulation.
| Environment | PPO | SAC |
|---|---|---|
| Reach | ||
| Lift | ||
| Stack |
@article{articlename,
author = {Anonymous},
title = {Dexsuite.},
journal = {TBD},
year = {2025},
}